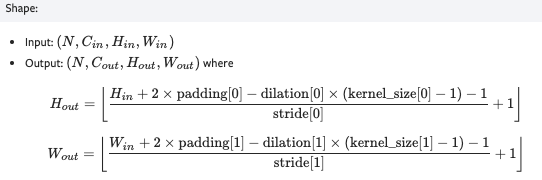
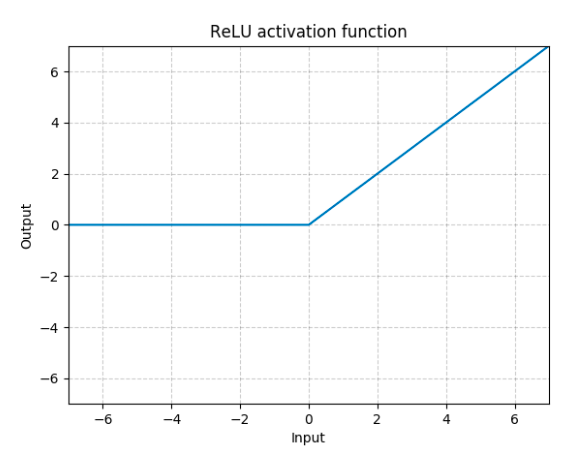
defforward(self, x): # Max pooling over a (2, 2) window x = F.max_pool2d(F.relu(self.conv1(x)), (2, 2)) # If the size is a square you can only specify a single number x = F.max_pool2d(F.relu(self.conv2(x)), 2) x = x.view(-1, self.num_flat_features(x)) x = F.relu(self.fc1(x)) x = F.relu(self.fc2(x)) x = self.fc3(x) return x
defnum_flat_features(self, x): size = x.size()[1:] # all dimensions except the batch dimension num_features = 1 for s in size: num_features *= s return num_features
# 计算损失值 output = net(input) target = torch.randn(10) # a dummy target, for example target = target.view(1, -1) # make it the same shape as output criterion = nn.MSELoss()
loss = criterion(output, target) print(loss)
反向传播
1 2 3 4 5 6 7 8 9 10
# 反向传播前后conv1的偏置项的变化 net.zero_grad() # zeroes the gradient buffers of all parameters
print('conv1.bias.grad before backward') print(net.conv1.bias.grad)
loss.backward()
print('conv1.bias.grad after backward') print(net.conv1.bias.grad)
# 使用python来实现这个规则 learning_rate = 0.01 for f in net.parameters(): f.data.sub_(f.grad.data * learning_rate)
1 2 3 4 5 6 7 8 9 10 11 12
# 使用内置包 import torch.optim as optim
# create your optimizer optimizer = optim.SGD(net.parameters(), lr=0.01)
# in your training loop: optimizer.zero_grad() # zero the gradient buffers output = net(input) loss = criterion(output, target) loss.backward() optimizer.step() # Does the update 实现参数更新,一般放在反向传播后面